How Savant Communicates With External Video Sources
Let us get acquainted with the top-level components of Savant. A “module” is a docker container where a pipeline running computer vision resides. Modules must somehow communicate with the external world: they capture video or images from cams, files, queues, and streaming servers and send results to other external systems like video archives, databases, broadcast systems, etc. In Savant, normally modules don’t do these things by themselves, delegating them to adapters, but direct interaction is also possible.
GStreamer implements pluggable architecture. There is a number of plugin types supported: sources, sinks, transformers. By default, it provides ready-to-use plugins to communicate with external data, like uridecodebin, videotestsrc or fakesink.
Savant also translates its manifest to a GStreamer pipeline, but with custom ZeroMQ source and ZeroMQ sink elements enabling the communication with data via special external processes called adapters (we introduce them in the next sections).
Those elements are defined in the module definition by default and usually are hidden from developers. However, the interested person may change the default source and sink to GStreamer elements like uridecodebin if the pipeline benefits from it.
The developer may encounter such customizations in our performance-related module definitions like shown in the example below:
1 source:
2 element: uridecodebin
3 properties:
4 uri: file:///data/road_traffic.mp4
5 sink:
6 - element: devnull_sink
Currently, the single source- and multiple sink declarations are supported.
Adapters
The adapters are standalone programs executed in separate Docker containers. They communicate with modules via ZeroMQ: source adapters ingest data, and sink adapters consume data from modules.
The decoupled nature of adapters guarantees high reliability because errors happening outside of the pipeline don’t propagate to the module. Thus, adapters deliver two main functions: abstracting the module from data sources and destinations and providing a foundation for fault-tolerant operations.
Adapters transfer video streams and metadata over network or locally. We implemented several handy adapters; interested parties can implement the specific adapters to address their situations: the protocol is based on open-source technologies.
Savant Adapter Protocol
Savant uses a protocol based on ZeroMQ and Savant-RS for communication between adapters and modules. It can be used to connect an adapter with other adapter, an adapter with a module, a module with a module, etc. The protocol is universal for source- and sink adapters.
With the protocol, one may build oriented graphs representing data sources, sinks, and modules, arranging them within a single host or in a distributed environment like K8s.
It supports transferring:
video frames [optional];
video stream-level information (encoding, fps, resolution, etc);
frame-related metadata (global per-frame attributes);
the hierarchy of objects and their attributes related to the frame.
The protocol is described in the Savant-RS serialization section.
Communication Sockets
Adapters and modules may use three different ZeroMQ patterns to communicate. The chosen pattern defines possible topologies and quality of service.
Currently, the following patterns are supported:
DEALER/ROUTER: reliable, asynchronous pair with backpressure (default choice);REQ/REP: reliable, synchronous pair (paranoid choice);PUB/SUB: unreliable, real-time pair (default choice for strict real-time operation or broadcasting).
You can read read more about ZeroMQ sockets on ZeroMQ website.
Savant currently supports two network transports:
Unix domain sockets;
TCP sockets (unicast).
You must prefer Unix domain sockets over TCP sockets when communication is established locally, especially when uncompressed frame formats are used (e.g., when using GigE Vision industrial cams or USB cams).
In Savant Unix domain sockets URLs look like as follows:
pub+connect:ipc:///tmp/zmq-sockets/input-video.ipc
pub+bind:ipc:///tmp/zmq-sockets/input-video.ipc
sub+bind:ipc:///tmp/zmq-sockets/input-video.ipc
dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc
router+bind:ipc:///tmp/zmq-sockets/input-video.ipc
# etc...
TCP sockets URLs look like as follows:
pub+bind:tcp://0.0.0.0:3332
sub+bind:tcp://0.0.0.0:3331
pub+connect:tcp://10.0.0.10:3331
# etc
When the transports are specified with the environment variables it looks like:
# Unix domain socket communication
ZMQ_ENDPOINT="dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc"
# which is equal to
ZMQ_ENDPOINT="ipc:///tmp/zmq-sockets/input-video.ipc"
ZMQ_TYPE="DEALER"
ZMQ_BIND="False"
Or:
# tcp socket communication
ZMQ_ENDPOINT="pub+bind:tcp://1.1.1.1:3333"
# which is equal to
ZMQ_ENDPOINT="tcp://1.1.1.1:3333"
ZMQ_TYPE="PUB"
ZMQ_BIND="True"
Not all socket pairs form “sane” communication patterns, so, you must use combinations colored green:

The Rules Of Thumb
Consider the following ideas when planning source-module-sink topologies:
Use the module in the bind mode, adapters in the connect mode; change if it does not work for you.
The party which delivers multiplexed stream usually has the bind type; the party which handles a single (non-multiplexed) stream usually has the connect type.
Use the
PUB/SUBpair when the pipeline or adapter is capable of handling the traffic in real-time.
Typical Patterns
We recommend starting with typical patterns when designing pipelines.
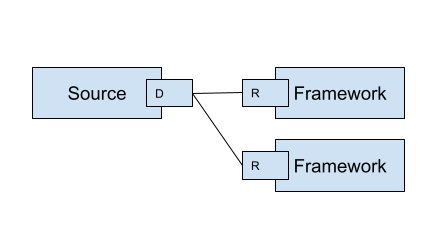
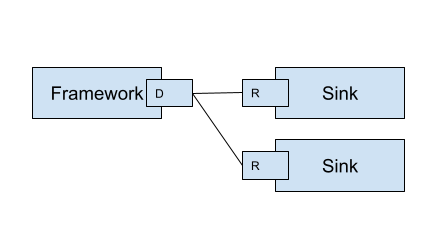
Legend:
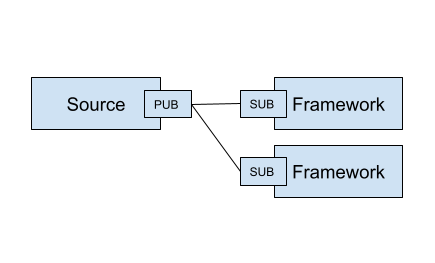
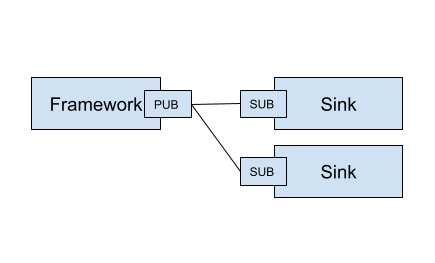
D- dealer;R- router;P- publisher (PUB);S- subscriber (SUB).
The pair combinations are discussed after the patterns-related sections.
Data-Center Patterns
Data-center patterns are used to reliably process video streams with increased latency in situations when the pipeline is overwhelmed with data. Typical ZeroMQ socket pairs used in data-center patterns are DEALER/ROUTER (recommended) or REQ/REP.
These pairs implement backpressure causing processing to be delayed when thresholds are reached.
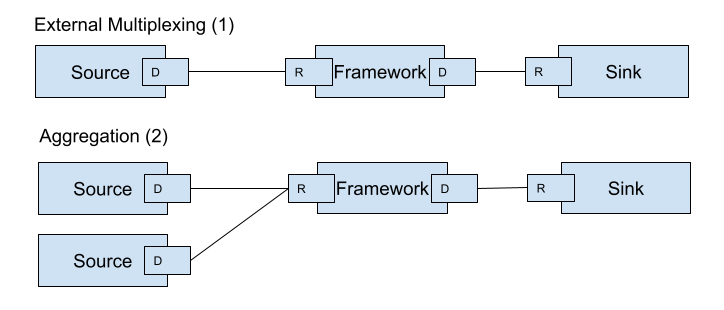
The first represents a typical scenario when an adapter reads multiplexed streams from an external queue system (like Kafka) and passes them to a module. The module, in turn, transfers results (and video) to an adapter delivering them into an external system.
The second is typical when adapters deliver data from several sources (e.g. RTSP cams) into a module instance. The right side of the pipeline stays the same as in the previous case.
Edge Patterns
Edge is usually used to serve low-latency real-time video processing. To implement that, we establish the PUB/SUB connection because it drops the packets that the SUB part cannot process on time.
This mechanism works great with streams delivering MJPEG, RAW, JPEG, PNG, and other independently encoded video frames. Using it with keyframe-encoded streams leads to video corruption.
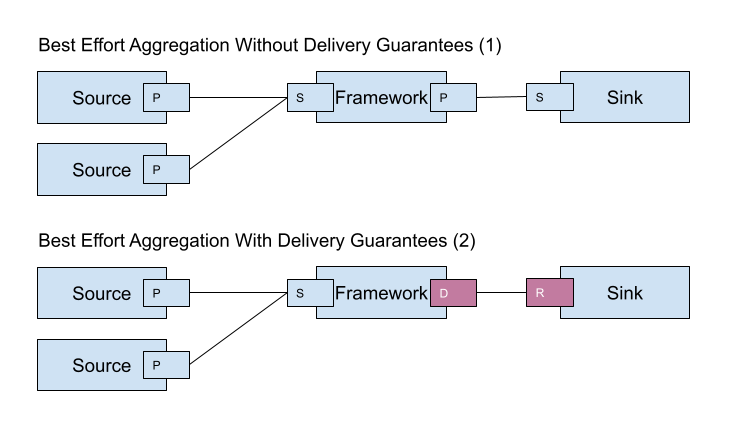
The first pattern can be used when neither adapters nor the module must get stuck because of the sink stalling. The second pattern is beneficial when a sink guarantees processing, and you do not worry that it may cause stalling.
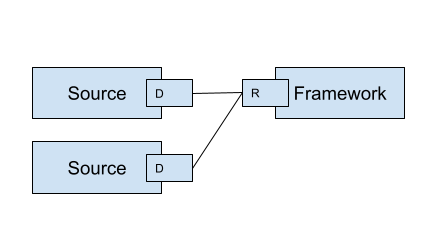
DEALER/ROUTER
This is the recommended pair when you don’t need to copy the same messages to multiple subscribers. It is a reliable socket pair: the DEALER will block if the ROUTER’s queue is full.
Source/CONNECT, Module/BIND. This is a typical scheme.
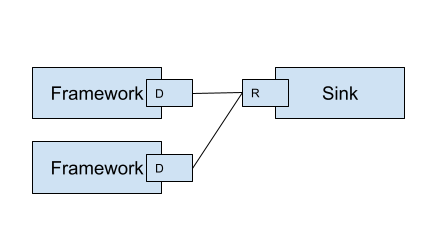
Module/CONNECT, Sink/BIND. This is a normal pattern when a sink adapter communicates with an external system like Kafka and wishes to send data from multiple module instances.
Source/BIND, Module/CONNECT. This is an exotic pattern. Nevertheless, it does the job when a module handles independent images without the need to maintain per-source order. In this scheme, the source will evenly distribute data between connected modules according to the LRU strategy, so it is impossible to use the scheme when you work with video.
Module/BIND, Sink/CONNECT. This is a valid pattern when sinks communicating with an external system require partitioning and data appending order is not critical.
REQ/REP
The REQ/REP pair is similar to DEALER/ROUTER except that the REQ part receives replies from the REP part every time the REP part reads the message.
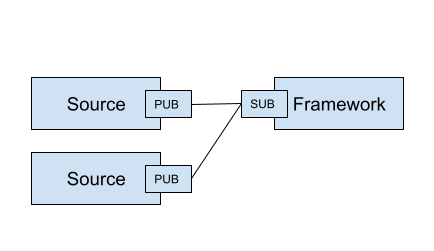
PUB/SUB
The PUB/SUB is convenient when you need to duplicate the same data to multiple subscribers. Another use case is real-time data processing: excessive elements are dropped if the pipeline cannot handle the traffic.
Source/BIND, Module/CONNECT. A source is initialized as a server (bind), and a module connects to it. This scheme can be used when the source already delivers multiple streams or the module handles a single stream provided by the source. In this scenario, the source can duplicate the same stream to multiple modules simultaneously.
Module/BIND, Sink/CONNECT. This scheme is used widely. A module duplicates the same data to multiple sinks. A sink can filter out only required data.
Source/CONNECT, Module/BIND. A typical scheme when a module handles multiple streams. The module binds to a socket and adapters connect to that socket.
Module/CONNECT, Sink/BIND. This is unusual but a correct scheme. A sink handles multiple outputs from modules to deliver them in a storage, e.g. Kafka or ClickHouse.
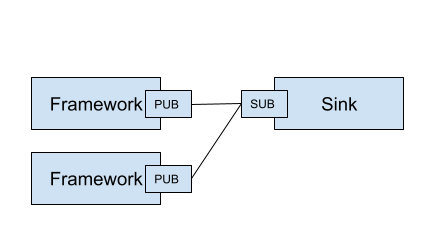
PUB/SUB examples:
delivering frames from a single camera to two different pipelines;
delivering resulting video analytics to two different adapters (e.g. for RTSP streaming and database ingestion).
PUB/SUB is unreliable (no backpressure), which means that if the subscriber is slow the frames may be lost because PUB never blocks. The adapter must handle incoming frames smartly (using internal queueing) to overcome that.
We recommend using the PUB/SUB in the following scenarios:
when processing independently encoded frames from a cam (
MJPEG,RGB, etc.), so when processing is slow, you can afford to drop frames;when an adapter is implemented in a way to read frames from the socket fast and know how to queue them internally.
Antipattern: passing video files over PUB/SUB to the module with no SYNC flag set.
Pattern example (Sink): Connecting multiple Always-On RTSP Sink instances to the module instance to cast multiple streams.
We provide adapters to address the common needs of users. The current list of adapters covers many typical scenarios in real life. Provided adapters can be used as an idea to implement a specific one required in your case.
Source Adapters
Source adapters deliver data from external sources (files, RTSP, devices) to a module.
Currently, the following source adapters are available:
Video loop adapter;
Local video file;
Local directory of video files;
Local image file;
Local directory of image files;
Image URL;
Video URL;
RTSP stream;
USB/CSI camera;
GigE (Genicam) industrial cam;
FFmpeg;
Multi-stream;
Kafka-Redis Source.
Most source adapters accept the following common parameters:
SOURCE_ID: a string identifier for a stream processed; this option is required; every stream must have a unique identifier, if identifiers collide, processing may cause unpredictable results; the identifier may encode user-defined semantics in a prefix, likertsp.stream.1; many sink adapters can filter out streams by prefix or fullSOURCE_ID;ZMQ_ENDPOINT: adapter’s socket where it sends media stream; it must form a valid ZeroMQ pair with module’s input socket; the endpoint coding scheme is[<socket_type>+(bind|connect):]<endpoint>;ZMQ_TYPE: a socket type; default isDEALER, also can be set toPUBorREQ; warning: this parameter is deprecated, consider encoding the type inZMQ_ENDPOINT;ZMQ_BIND; a socket mode (thebindmode is when the parameter is set toTrue); default isFalse; warning: this parameter is deprecated, consider encoding the type inZMQ_ENDPOINT;FPS_PERIOD_FRAMES; a number of frames between FPS reports; FPS reporting helps to estimate the performance of the pipeline components deployed; default is1000;FPS_PERIOD_SECONDS; a number of seconds between FPS reports; default isNonewhich means that FPS reporting usesFPS_PERIOD_FRAMES;FPS_OUTPUT; a path to the file for FPS reports; default isstdout.
Image File Source Adapter
The Image File Source Adapter sends JPEG or PNG files to a module. It may be used to generate video streams from separate images or process independent images.
The images are served from:
a local path to a single file;
a local path to a directory with files (not necessarily in the same encoding);
an HTTP URL to a single file.
Note
The adapter is useful for development purposes: a developer can associate every image with extra metadata in JSON format to implement pipeline testing. E.g., you may add metadata for expected bounding boxes and evaluate assertions in the pipeline to validate that the model predicts them.
Note
The adapter also can be used to implement asynchronous image processing pipelines. Metadata allows passing per-image identification information over the pipeline to access the results when those images are processed.
Parameters:
FILE_TYPE: a flag specifying that the adapter is used for images; it must always be set topicture;LOCATION: a filesystem location (path or directory) or HTTP URL from where images are served;FRAMERATE: a desired framerate for the output video stream generated from image files (the parameter is used only ifSYNC_OUTPUT=True);SYNC_OUTPUT: a flag indicating that images are delivered into a module as a video stream; otherwise, the files are sent as fast as the module is capable processing them; default isFalse;EOS_ON_FILE_END: a flag configuring sending ofEOSmessage after every image; theEOSmessage is important to trackers, helping them to reset tracking when a video stream is no longer continuous; default isFalse;SORT_BY_TIME: a flag specifying sorting by modification time (ascending); by default, it isFalse, causing the files to be sorted lexicographically;READ_METADATA: a flag specifying the need to augment images with metadata fromJSONfiles with the corresponding names as the source files; default isFalse.
Running the adapter with Docker:
docker run --rm -it --name source-pictures-files-test \
--entrypoint /opt/savant/adapters/gst/sources/media_files.sh \
-e FILE_TYPE=picture \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID=test \
-e LOCATION=/path/to/images \
-v /path/to/images:/path/to/images:ro \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py pictures --source-id=test /path/to/images
Video File Source Adapter
The Video File Source Adapter sends video files to a module as a single stream.
The video files are served from:
a local path to a single file;
a local path to a directory with one or more files;
HTTP URL to a single file;
Parameters:
FILE_TYPE: must be set tovideo;LOCATION: a video file(s) location or URL;EOS_ON_FILE_END: a flag indicating whether to send theEOSmessage at the end of each file; default isTrue; theEOSmessage is crucial for trackers to recognize when a video stream is no longer continuous; when sending ordered parts of a single video file without gaps usually must be set toFalse;SYNC_OUTPUT: flag specifying if to send frames synchronously (i.e. at the source file rate); default isFalse;SORT_BY_TIME: a flag indicating whether files are sorted by modification time (ascending) before sending to a module; by default, it isFalse(lexicographical sorting);READ_METADATA: a flag specifying the need to augment video frames with metadata fromJSONfiles with the corresponding names as the source files; default isFalse.
Running the adapter with Docker:
docker run --rm -it --name source-video-files-test \
--entrypoint /opt/savant/adapters/gst/sources/media_files.sh \
-e FILE_TYPE=video \
-e SYNC_OUTPUT=False \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID=test \
-e LOCATION=/path/to/data/test.mp4 \
-v /path/to/data/test.mp4:/path/to/data/test.mp4:ro \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py videos --source-id=test /path/to/data/test.mp4
Note
The resulting video stream framerate is set to the framerate of the first video file; subsequent files are delivered with the same FPS. Consider having the same framerate for all video files or serving each file separately. The adapter is lightweight, and the cost of launching is negligible.
Video Loop Source Adapter
The Video Loop Source Adapter sends a video file continuously in a loop.
The file location can be:
a local file;
an HTTP URL;
Note
The adapter helps developers create infinite video streams for benchmarking, demonstrating, and testing purposes. It allows configuring a frame loss ratio to test processing in an unstable environment.
Parameters:
LOCATION: a video file local path or URL;EOS_ON_LOOP_END: a flag indicating whether to sendEOSmessage at the end of each loop; default isFalse;READ_METADATA: a flag indicating the need to augment the stream with metadata from a JSON file corresponding to the source file; default isFalse;SYNC_OUTPUT: a flag indicating the need to send frames from source synchronously (i.e. at the source file rate); default isFalse;DOWNLOAD_PATH: a directory to download the file from remote storage before playing it;LOSS_RATE: a probability to drop the frames.
Running the adapter with Docker:
docker run --rm -it --name source-video-loop-test \
--entrypoint /opt/savant/adapters/gst/sources/video_loop.sh \
-e SYNC_OUTPUT=True \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID=test \
-e LOCATION=/path/to/data/test.mp4 \
-e DOWNLOAD_PATH=/tmp/video-loop-source-downloads \
-v /path/to/data/test.mp4:/path/to/data/test.mp4:ro \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
-v /tmp/video-loop-source-downloads:/tmp/video-loop-source-downloads \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py video-loop --source-id=test /path/to/data/test.mp4
RTSP Source Adapter
The RTSP Source Adapter delivers RTSP stream to a module.
Parameters:
RTSP_URI(required): an RTSP URI of the stream;SYNC_OUTPUT: a flag indicating the need to send frames from source synchronously (i.e. at the source file rate); default isFalse;SYNC_DELAY: a delay in seconds before sending frames; when the source hasB-frames the flag allows avoiding sending frames in batches; default is0;RTSP_TRANSPORT: a transport protocol to use; default istcp;BUFFER_LEN: a maximum amount of frames in the buffer; default is50;
Running the adapter with Docker:
docker run --rm -it --name source-video-files-test \
--entrypoint /opt/savant/adapters/gst/sources/rtsp.sh \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID=test \
-e RTSP_URI=rtsp://192.168.1.1 \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py rtsp --source-id=test rtsp://192.168.1.1
USB Cam Source Adapter
The USB/CSI cam source adapter captures frames from a V4L2-compatible device.
Parameters:
DEVICE: a USB/CSI cam device; default is/dev/video0;FRAMERATE: a desired framerate for the video stream captured from the device; note that if the input device does not support specified video framerate, results may be unexpected;
Running the adapter with Docker:
docker run --rm -it --name source-video-files-test \
--entrypoint /opt/savant/adapters/gst/sources/rtsp.sh \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID=test \
-e DEVICE=/dev/video0 \
-e FRAMERATE=30/1 \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py usb-cam --source-id=test --framerate=30/1 /dev/video0
GigE Vision Source Adapter
Tip
Additional information on GigE Vision cameras support in the blog.
The adapter is designed to take video streams from Ethernet GigE Vision industrial cams. It passes the frames captured from the camera to the module without encoding (#18) which may introduce significant network load. We recommend using it locally with the module deployed at the same host.
Parameters:
WIDTH: the width of the video frame, in pixels;HEIGHT: the height of the video frame, in pixels;FRAMERATE: the framerate of the video stream, in frames per second;INPUT_CAPS: the format of the video stream, in GStreamer caps format (e.g. video/x-raw,format=RGB);PACKET_SIZE: the packet size for GigEVision cameras, in bytes;AUTO_PACKET_SIZE: whether to negotiate the packet size automatically for GigEVision cameras;EXPOSURE: the exposure time for the camera, in microseconds;EXPOSURE_AUTO: the auto exposure mode for the camera, one ofoff,once, oron;GAIN: the gain for the camera, in decibels;GAIN_AUTO: the auto gain mode for the camera, one ofoff,once, oron;FEATURES: additional configuration parameters for the camera, as a space-separated list of features;HOST_NETWORK: host network to use;CAMERA_NAME: name of the camera, in the format specified in the command description;ENCODE: a flag indicating the need to encode video stream with HEVC codec; default isFalse;ENCODE_BITRATE: the bitrate for the encoded video stream, in kbit/sec; default is2048;ENCODE_KEY_INT_MAX: the maximum interval between two keyframes, in frames; default is30;ENCODE_SPEED_PRESET: preset name for speed/quality tradeoff options; one ofultrafast,superfast,veryfast,faster,fast,medium,slow,slower,veryslow,placebo; default ismedium;ENCODE_TUNE: preset name for tuning options; one ofpsnr,ssim,grain,zerolatency,fastdecode,animation; default iszerolatency.
Running the adapter with Docker:
docker run --rm -it --name source-video-files-test \
--entrypoint /opt/savant/adapters/gst/sources/gige_cam.sh \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID=test \
-e CAMERA_NAME=test-camera \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py gige --source-id=test test-camera
FFmpeg Source Adapter
The adapter delivers video stream using FFmpeg library. It can be used to read video files, RTSP streams, and other sources supported by FFmpeg.
Parameters:
URI(required): an URI of the stream;FFMPEG_PARAMS: a comma separated stringkey=valuewith parameters for FFmpeg (e.g.rtsp_transport=tcp,input_format=mjpeg,video_size=1280x720);FFMPEG_LOGLEVEL: a log level for FFmpeg; default isinfo;BUFFER_LEN: a maximum amount of frames in FFmpeg buffer; default is50;SYNC_OUTPUT: a flag indicating the need to send frames from source synchronously (i.e. at the source file rate); default isFalse;SYNC_DELAY: a delay in seconds before sending frames; default is0.
Running the adapter with Docker:
docker run --rm -it --name source-ffmpeg-test \
--entrypoint /opt/savant/adapters/gst/sources/ffmpeg.sh \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID=test \
-e URI=rtsp://192.168.1.1 \
-e FFMPEG_PARAMS=rtsp_transport=tcp \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py ffmpeg --source-id=test --ffmpeg-params=input_format=mjpeg,video_size=1280x720 --device=/dev/video0 /dev/video0
Multi-stream Source Adapter
The Multi-stream Source Adapter sends the same video file to multiple streams.
Note
The purpose of the adapter is to benchmark modules under the load to find out their FPS capacity.
The file location is:
a local file;
an HTTP URL;
Parameters:
LOCATION(required): a video file local path or URL;SOURCE_ID_PATTERN: a pattern for stream source identifiers; use%d,%03dplaceholders for stream idx. Default issource-%d, usually no need to change it;NUMBER_OF_STREAMS: a number of parallel streams; default is1;NUMBER_OF_FRAMES: a number of frames to be sent to each stream; if not specified, all frames from the video file will be sent;SHUTDOWN_AUTH: an authentication key to shutdown the module after all frames were sent. Must matchparameters.shutdown_authin the module configuration to have an effect;READ_METADATA: a flag indicating the need to augment the stream with metadata from a JSON file corresponding to the source file; default isFalse;SYNC_OUTPUT: a flag indicating the need to send frames from source synchronously (i.e. at the source file rate); default isFalse; the parameter can be used to simulate real-time sources like RTSP-cams;DOWNLOAD_PATH: a directory to download the file from remote storage before playing it.
Note
The adapter doesn’t have SOURCE_ID parameter.
Running the adapter with Docker:
docker run --rm -it --name source-multi-stream-test \
--entrypoint /opt/savant/adapters/gst/sources/multi_stream.sh \
-e SYNC_OUTPUT=True \
-e ZMQ_ENDPOINT=dealer+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e SOURCE_ID_PATTERN='camera-%d' \
-e NUMBER_OF_STREAMS=4 \
-e SHUTDOWN_AUTH=shutdown-key \
-e LOCATION=/path/to/data/test.mp4 \
-e DOWNLOAD_PATH=/tmp/video-loop-source-downloads \
-v /path/to/data/test.mp4:/path/to/data/test.mp4:ro \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
-v /tmp/video-loop-source-downloads:/tmp/video-loop-source-downloads \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_source.py multi-stream --source-id-pattern='camera-%d' --number-of-sources=4 --shutdown-auth=shutdown-key /path/to/data/test.mp4
Kafka-Redis Source Adapter
The Kafka-Redis Source Adapter takes video stream metadata from Kafka and fetches frame content from Redis. Frame content location is encoded as <redis-host>:<redis-port>:<redis-db>/<redis-key>.
Parameters:
KAFKA_BROKERS(required): a comma-separated list of Kafka brokers;KAFKA_TOPIC(required): a Kafka topic to read messages from;KAFKA_GROUP_ID(required): a Kafka consumer group ID;KAFKA_CREATE_TOPIC: a flag indicating whether to create a Kafka topic if it does not exist; default isFalse;KAFKA_CREATE_TOPIC_NUM_PARTITIONS: a number of partitions for a Kafka topic to create; default is1;KAFKA_CREATE_TOPIC_REPLICATION_FACTOR: a replication factor for a Kafka topic to create; default is1;KAFKA_CREATE_TOPIC_CONFIG: a json dict of a Kafka topic configuration, see topic configs (e.g.{"retention.ms": 300000}); default is{};KAFKA_POLL_TIMEOUT: a timeout for Kafka consumer poll, in seconds; default is1;KAFKA_AUTO_COMMIT_INTERVAL_MS: a frequency in milliseconds that the consumer offsets are auto-committed to Kafka; default is1000;KAFKA_AUTO_OFFSET_RESET: a position to start reading messages from Kafka topic when the group is created; default islatest;KAFKA_PARTITION_ASSIGNMENT_STRATEGY: a strategy to assign partitions to consumers; default isroundrobin;KAFKA_MAX_POLL_INTERVAL_MS: a maximum delay in milliseconds between invocations of poll() when using consumer group management; default is300000;QUEUE_SIZE: a maximum amount of messages in the queue; default is50.
Note
The adapter doesn’t have SOURCE_ID, ZMQ_TYPE, ZMQ_BIND parameters.
Running the adapter with Docker:
docker run --rm -it --name source-kafka-redis-test \
--entrypoint python \
-e ZMQ_ENDPOINT=pub+connect:ipc:///tmp/zmq-sockets/input-video.ipc \
-e KAFKA_BROKERS=kafka:9092 \
-e KAFKA_TOPIC=kafka-redis-adapter-demo \
-e KAFKA_GROUP_ID=kafka-redis-adapter-demo \
-e KAFKA_CREATE_TOPIC=True \
-e KAFKA_CREATE_TOPIC_NUM_PARTITIONS=4 \
-e KAFKA_CREATE_TOPIC_REPLICATION_FACTOR=1 \
-e 'KAFKA_CREATE_TOPIC_CONFIG={"retention.ms": 300000}' \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-py:latest \
-m adapters.python.sources.kafka_redis
Running with the helper script:
./scripts/run_source.py kafka-redis --brokers=kafka:9092 --topic=kafka-redis-adapter-demo --group-id=kafka-redis-adapter-demo
Sink Adapters
There is a number of sink adapters implemented:
JSON Metadata;
Image File;
Video File;
Display;
Always-On RTSP.
All sync adapters accept the following parameters:
ZMQ_ENDPOINT: a ZeroMQ socket for data input matching the one specified in module’s output; the endpoint coding scheme is[<socket_type>+(bind|connect):]<endpoint>;ZMQ_TYPE: a ZeroMQ socket type for the adapter’s input; the default value isSUB, can also be set to ROUTER orREP; warning: this parameter is deprecated, consider encoding the type inZMQ_ENDPOINT;ZMQ_BIND: a parameter specifying whether the adapter’s input should be bound or connected to the specified endpoint; IfTrue, the input is bound; otherwise, it’s connected; the default value isFalse; warning: this parameter is deprecated, consider encoding the type inZMQ_ENDPOINT.
JSON Metadata Sink Adapter
The JSON Metadata Sink Adapter writes received messages as newline-delimited JSON streaming files specified as:
a local path to a single file;
a local path with substitution patterns:
%source_idinsertsSOURCE_IDvalue into resulting filename;%src_filenameinserts source filename into resulting filename.
Parameters:
DIR_LOCATION: a location to write files to; can be a plain location or a pattern; supported substitution parameters are%source_idand%src_filename;CHUNK_SIZE: a chunk size in a number of frames; the stream is split into chunks and is written to separate folders with consecutive numbering; default is10000; a value of0disables chunking, resulting in a continuous stream of frames bysource_id;SKIP_FRAMES_WITHOUT_OBJECTS: a flag indicating whether frames without detected objects are ignored in output; the default value isFalse;SOURCE_ID: an optional filter to filter out frames with a specificsource_idonly;SOURCE_ID_PREFIXan optional filter to filter out frames with a matchingsource_idprefix only.
Running the adapter with Docker:
docker run --rm -it --name sink-meta-json \
--entrypoint /opt/savant/adapters/python/sinks/metadata_json.py \
-e ZMQ_ENDPOINT=sub+connect:ipc:///tmp/zmq-sockets/output-video.ipc \
-e LOCATION=/path/to/output/%source_id-%src_filename \
-e CHUNK_SIZE=0 \
-v /path/to/output/:/path/to/output/ \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-py:latest
Running with the helper script:
./scripts/run_sink.py meta-json /path/to/output/%source_id-%src_filename
Image File Sink Adapter
The image file sink adapter extends the JSON metadata adapter by writing image files along with metadata JSON files to a directory specified with DIR_LOCATION.
Parameters:
DIR_LOCATION: a location to write files to; can be a regular path or a path template; supported substitution parameters are%source_idand%src_filename;CHUNK_SIZE: a chunk size in a number of frames; the stream is split into chunks and is written to separate directories with consecutive numbering; default is10000; A value of0disables chunking, resulting in a continuous stream of frames bysource_id;SKIP_FRAMES_WITHOUT_OBJECTS: a flag indicating whether frames without objects are ignored in output; the default value isFalse;SOURCE_ID: an optional filter to filter out frames with a specificsource_idonly;SOURCE_ID_PREFIXan optional filter to filter out frames with a matchingsource_idprefix only.
Running the adapter with Docker:
docker run --rm -it --name sink-meta-json \
--entrypoint /opt/savant/adapters/python/sinks/image_files.py \
-e ZMQ_ENDPOINT=sub+connect:ipc:///tmp/zmq-sockets/output-video.ipc \
-e DIR_LOCATION=/path/to/output/%source_id-%src_filename \
-e CHUNK_SIZE=0 \
-v /path/to/output/:/path/to/output/ \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-py:latest
Running with the helper script:
./scripts/run_sink.py image-files /path/to/output/%source_id-%src_filename
Video File Sink Adapter
The video file sink adapter extends the JSON metadata adapter by writing video files along with metadata JSON files to a directory specified with DIR_LOCATION.
Parameters:
DIR_LOCATION: a location to write files to; can be a regular path or a path template; supported substitution parameters are%source_idand%src_filename;CHUNK_SIZE: a chunk size in a number of frames; the stream is split into chunks and is written to separate folders with consecutive numbering; default is10000; A value of0disables chunking, resulting in a continuous stream of frames bysource_id;SKIP_FRAMES_WITHOUT_OBJECTS: a flag indicating whether frames without objects are ignored in output; the default value isFalse;SOURCE_ID: an optional filter to filter out frames with a specificsource_idonly;SOURCE_ID_PREFIXan optional filter to filter out frames with a matchingsource_idprefix only.
Running the adapter with Docker:
docker run --rm -it --name sink-meta-json \
--entrypoint /opt/savant/adapters/gst/sinks/video_files.sh \
-e ZMQ_ENDPOINT=sub+connect:ipc:///tmp/zmq-sockets/output-video.ipc \
-e DIR_LOCATION=/path/to/output/%source_id-%src_filename \
-e SKIP_FRAMES_WITHOUT_OBJECTS=False \
-e CHUNK_SIZE=0 \
-v /path/to/output/:/path/to/output/ \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-gstreamer:latest
Running with the helper script:
./scripts/run_sink.py video-files /path/to/output/%source_id-%src_filename
Display Sink Adapter
The Display Sink Adapter is a visualizing adapter designed for development purposes. To use this adapter, you need a working X server and monitor. The adapter is used with synchronous streams, so for expected operation, the data source must be served with SYNC=True. The adapter also allows specifying the SYNC flag, but it is better to configure it on the source side.
Parameters:
CLOSING_DELAY: a delay in seconds before closing the window after the video stream has finished, the default value is0;SYNC_OUTPUT: a flag indicating whether to show the frames on the sink synchronously with the source (i.e., at the source file rate); if you are intending to useSYNCprocessing, considerDEALER/ROUTERorREQ/REPsockets, becausePUB/SUBmay drop packets when queues are overflown;SOURCE_ID: an optional filter to filter out frames with a specificsource_idonly;SOURCE_ID_PREFIX: an optional filter to filter out frames with asource_idprefix only.
Running the adapter with Docker:
docker run --rm -it --name sink-display \
--entrypoint /opt/savant/adapters/ds/sinks/display.sh \
-e SYNC_OUTPUT=False \
-e ZMQ_ENDPOINT=sub+connect:ipc:///tmp/zmq-sockets/output-video.ipc \
-e DISPLAY \
-e XAUTHORITY=/tmp/.docker.xauth \
-e CLOSING_DELAY=0 \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /tmp/.docker.xauth:/tmp/.docker.xauth \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
--gpus=all \
ghcr.io/insight-platform/savant-adapters-deepstream:latest
Running with the helper script:
./scripts/run_sink.py display
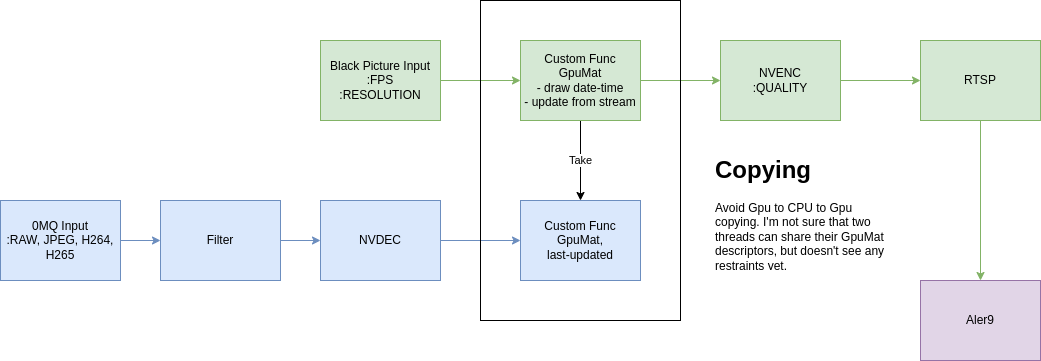
Always-On RTSP Sink Adapter
The Always-On RTSP Sink Adapter broadcasts the video stream as RTSP/LL-HLS/WebRTC. The adapter works in two modes: single-stream and multi-stream. In the single-stream mode, the adapter accepts only one input stream with source ID specified in SOURCE_ID. In the multi-stream mode, the adapter accepts multiple input streams with source IDs specified in SOURCE_IDS.
This adapter uses DeepStream SDK and always performs hardware transcoding of the incoming stream to ensure continuous streaming even when its source stops operating. In this case, the adapter continues to stream a static image waiting for the source to resume sending data.
The simplified design of the adapter is depicted in the following diagram:
Note
We use Always-On RTSP Adapter in our demos. Take a look at one of them to get acquainted with its use.
Parameters:
RTSP_URI: an URI of the RTSP server where to cast the stream, this parameter is required only whenDEV_MODE=False. The sink sends video stream toRTSP_URIin single-stream mode and to
RTSP_URI/{source-id}in multi-stream mode;
DEV_MODE: enables the use of embedded MediaMTX to serve a stream; default value isFalse;STUB_FILE_LOCATION: the location of a stub image file; the image file must be inJPEGformat, this parameter is required; the stub image file is shown when there is no input data; the stub file dimensions define the resolution of the output stream;MAX_DELAY_MS: a maximum delay in milliseconds to wait after the last frame received before the stub image is displayed; default is1000;TRANSFER_MODE: a transfer mode specification; one of:scale-to-fit,crop-to-fit; the default value isscale-to-fit; the parameter defines how the incoming video stream is mapped to the resulting stream;PROTOCOLS: enabled transport protocols, e.g.tcp+udp-mcast+udp; the default value istcp;LATENCY_MS: resulting RTSP stream buffer size in ms, default value is100;KEEP_ALIVE: whether to send RTSP keep alive packets; set it toFalsefor old incompatible server, default value isTrue;PROFILE: an H264 encoding profile; one of:Baseline,Main,High; the default value isHigh;BITRATE: an H264 encoding bitrate; the default value is4000000;FRAMERATE: a frame rate for the output stream; the default value is30/1;METADATA_OUTPUT: where to dump metadata (stdoutorlogger);SYNC_OUTPUT: a flag indicates whether to show frames on sink synchronously (i.e. at the source rate); the streaming may be not stable with this flag, try to avoid it; the default value isFalse;SOURCE_ID: a filter to receive frames with a specificsource_idonly. The sink works in single-stream mode when this option is specified;SOURCE_IDS: a filter to receive frames with specificsource_id-s only. The sink works in multi-stream mode when this option is specified.
When DEV_MODE=True the stream is available at:
RTSP:
rtsp://<container-host>:554/stream(single-stream),rtsp://<container-host>:554/stream/{source-id}(multi-stream)RTMP:
rtmp://<container-host>:1935/stream(single-stream),rtmp://<container-host>:1935/stream/{source-id}(multi-stream)LL-HLS:
http://<container-host>:888/stream(single-stream),http://<container-host>:888/stream/{source-id}(multi-stream)WebRTC:
http://<container-host>:8889/stream(single-stream),http://<container-host>:8889/stream/{source-id}(multi-stream)
Running the adapter with Docker:
docker run --rm -it --name sink-always-on-rtsp \
--gpus=all \
--entrypoint python \
-e SYNC_OUTPUT=False \
-e ZMQ_ENDPOINT=sub+connect:ipc:///tmp/zmq-sockets/output-video.ipc \
-e SOURCE_ID=test \
-e STUB_FILE_LOCATION=/path/to/stub_file/test.jpg \
-e MAX_DELAY_MS=1000 \
-e TRANSFER_MODE=scale-to-fit \
-e RTSP_URI=rtsp://192.168.1.1 \
-e RTSP_PROTOCOLS=tcp \
-e RTSP_LATENCY_MS=100 \
-e RTSP_KEEP_ALIVE=True \
-e ENCODER_PROFILE=High \
-e ENCODER_BITRATE=4000000 \
-e FRAMERATE=30/1 \
-v /path/to/stub_file/test.jpg:/path/to/stub_file/test.jpg:ro \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-deepstream:latest \
-m adapters.ds.sinks.always_on_rtsp
Running the adapter with the helper script:
./scripts/run_sink.py always-on-rtsp --source-id=test --stub-file-location=/path/to/stub_file/test.jpg rtsp://192.168.1.1
Kafka-Redis Sink Adapter
The Kafka-Redis Sink Adapter sends video stream metadata to Kafka and frame content to Redis. Frame content location is encoded as <redis-host>:<redis-port>:<redis-db>/<redis-key>.
Parameters:
KAFKA_BROKERS(required): a comma-separated list of Kafka brokers;KAFKA_TOPIC(required): a Kafka topic to put messages to;KAFKA_CREATE_TOPIC: a flag indicating whether to create a Kafka topic if it does not exist; default isFalse;KAFKA_CREATE_TOPIC_NUM_PARTITIONS: a number of partitions for a Kafka topic to create; default is1;KAFKA_CREATE_TOPIC_REPLICATION_FACTOR: a replication factor for a Kafka topic to create; default is1;KAFKA_CREATE_TOPIC_CONFIG: a json dict of a Kafka topic configuration, see topic configs (e.g.{"retention.ms": 300000}); default is{};REDIS_HOST(required): a Redis host;REDIS_PORT: a Redis port; default is6379;REDIS_DB: a Redis database; default is0;REDIS_KEY_PREFIX: a prefix for Redis keys; frame content is put to Redis with a keyREDIS_KEY_PREFIX:UUID; default issavant:frames;REDIS_TTL_SECONDS: a TTL for Redis keys; default is60;QUEUE_SIZE: a maximum amount of messages in the queue; default is50.
Running the adapter with Docker:
docker run --rm -it --name sink-kafka-redis-test \
--entrypoint python \
-e ZMQ_ENDPOINT=sub+connect:ipc:///tmp/zmq-sockets/output-video.ipc \
-e KAFKA_BROKERS=kafka:9092 \
-e KAFKA_TOPIC=kafka-redis-adapter-demo \
-e KAFKA_CREATE_TOPIC=True \
-e KAFKA_CREATE_TOPIC_NUM_PARTITIONS=4 \
-e KAFKA_CREATE_TOPIC_REPLICATION_FACTOR=1 \
-e 'KAFKA_CREATE_TOPIC_CONFIG={"retention.ms": 300000}' \
-e REDIS_HOST=redis \
-e REDIS_PORT=6379 \
-v /tmp/zmq-sockets:/tmp/zmq-sockets \
ghcr.io/insight-platform/savant-adapters-py:latest \
-m adapters.python.sinks.kafka_redis
Note
The adapter doesn’t have ZMQ_TYPE, ZMQ_BIND parameters.
Running the adapter with the helper script:
./scripts/run_sink.py kafka-redis --brokers=kafka:9092 --topic=kafka-redis-adapter-demo --redis-host=redis